Half out of future necessity and half out of simply the urge to tinker with something new, I got a Raspberry Pi. I had considered other microcomputers like the Beagle Bone Black, but I decided to go with the Pi because of software/driver maturity and large community. All the peripheral support, drivers, dev tools, etc I’d need for my projects on the Pi has been well sorted out, optimized, and nicely documented. I want to make cool stuff, not be a pioneer of the embedded linux world.
I have a couple of projects in mind for the Pi. The first will be to power my hexapod robot, B.E.T.H. The Pi will have enough grunt to run all my IK and future terrain adaption algorithms as well as do some light machine vision. The second project I think will be a digital dashboard/data logger for my car.
So far i have the Pi up and running pretty well. I’m using the WiringPi libraries to recreate some of the Arduino functions. It was fairly straight forward porting over the original arduino code to C++ on the Pi. I’ve been coding on the Pi directly using the Geany IDE in X. I’m using floating point math to improve accuracy where ever effective.
The overall hardware plan for B.E.T.H. looks like this:
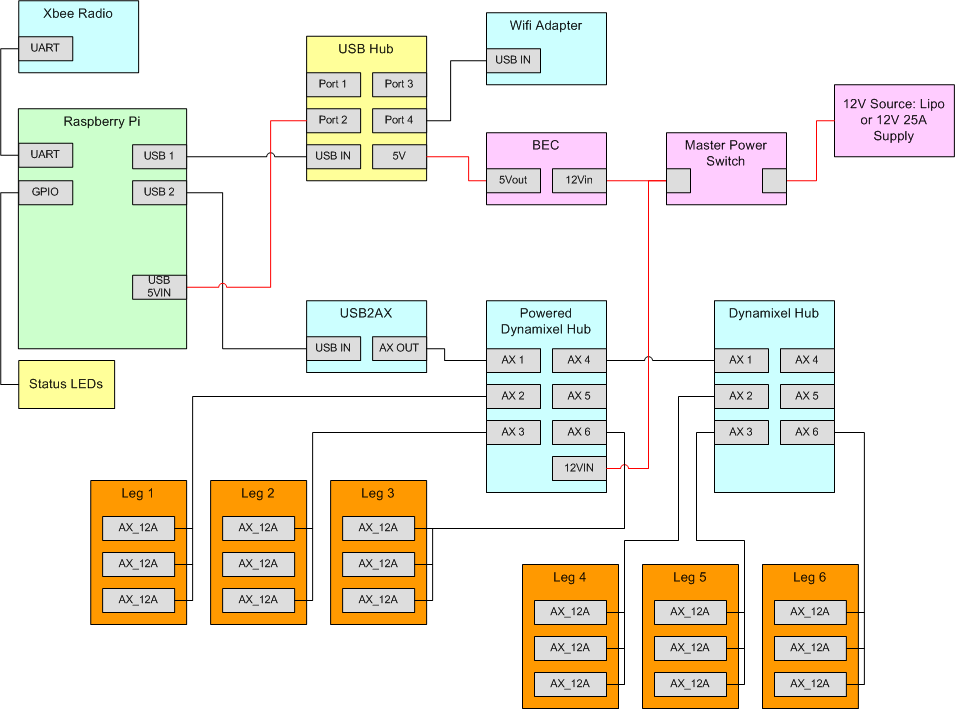
I’m using an Xbee breakout board from Sparkfun to physically connect the Xbee. It only takes power, ground, TX, and RX connected to the Pi’s UART and it works like a champ. Note that the Pi’s UART is configured to run a console output by defualt. You have to disable that functionality before its free to use.
To control the Dynamixel AX-12A servos, I’m using the USB2AX from Xevelabs. Its great due to its small form factor and USB speed optimizations. For software, you use the Robotis Dynamixel SDK.
The BEC is an RC type from Castle Creations. It works perfectly because its small and light, can take up to 25VDC in, and the adjustable output is programmed to 5.1V by default which is perfect for powering the USB hub and Pi. UPDATE: The CC BEC crapped out on me after about 20 minutes. I’m not sure why. I’ve since switched to the Murata switching regulator and it’s been great.
The D-Link DWA-131 USB wifi adapter isn’t necessary for running B.E.T.H., but its needed to SSH/VNC into the Pi or to run the Pi directly and access the network/internet wirelessly. For $20 its worth having. I chose this model because the chipset is supported out of the box by the linux kernel and again, its pretty small.
The last part I needed was a powered Dynamixel hub. This acts as a normal Dynamixel hub but it also provides an easy interface for applying power to the servos. I’ll probably use the set screw terminals as a distribution block for branching power.
My next task is cramming all of this stuff into the hex body!