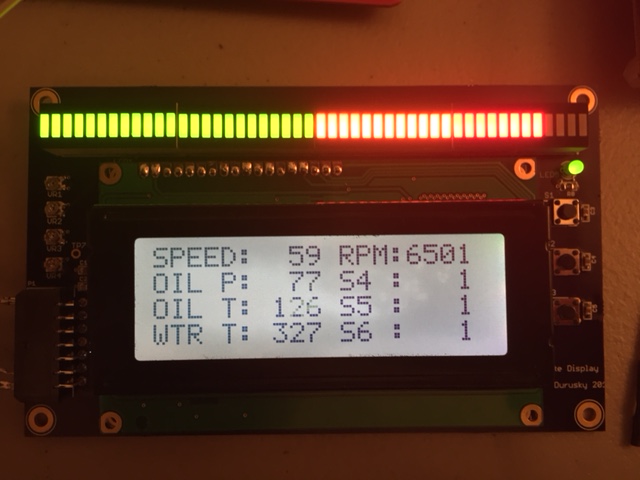
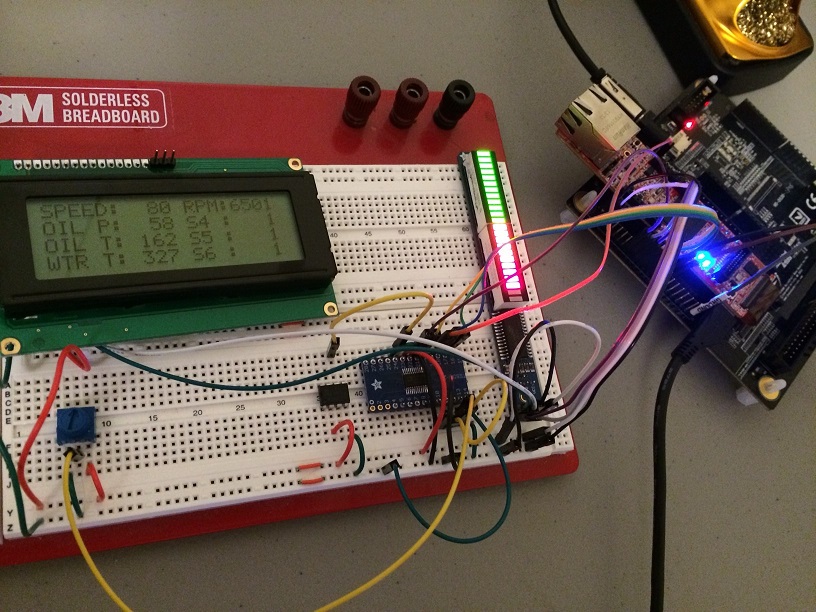
The dashboard/logger is starting to come together. Most of the sensor functionality I want is in place, it logs well, etc. The tricky part now is how to display all this info in a way that is useful and clear while driving the car.
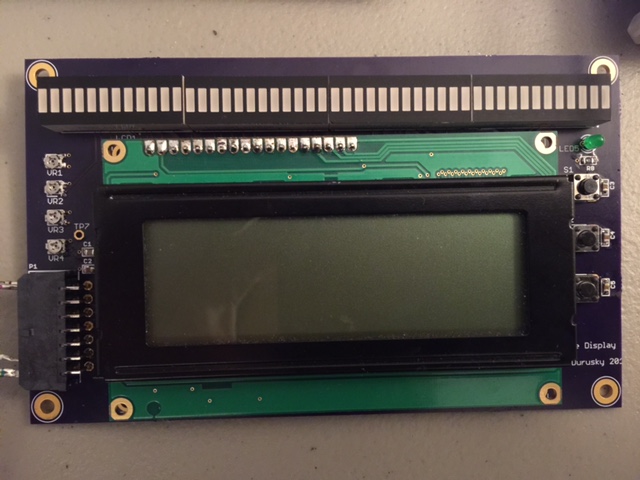
One of the most import visual outputs is the shift light itself. The setup i’m using is fairly large and clear with enough length and resolution to hopefully make it clear where you are in the rev band and how its trending. I do hope that they are bright enough to see in the sunlight, but I think having it mounted in the factory dash area under the dash hood should make this ok.
The second most important indication is for the warning messages. If my oil pressure drops or I start to overheat, i want it to be very clear very quickly. As of now, if there is an alarm condition, the whole display changes to a warning message screen:
 “Warning”, “Achtung!”, “Danger to the Manifold”, would all be appropriate. At the same time the shift lights will all blink red. I can display up to three alarms at once should hopefully be enough, even for a German car.
“Warning”, “Achtung!”, “Danger to the Manifold”, would all be appropriate. At the same time the shift lights will all blink red. I can display up to three alarms at once should hopefully be enough, even for a German car.
Lastly, i thought it would be cool to have a large number display for the gear indicator. While i generally know what gear I’m in, i’m moving to a 3.46 rear end in the E36 this year and will be shifting more often so it may come in handy.
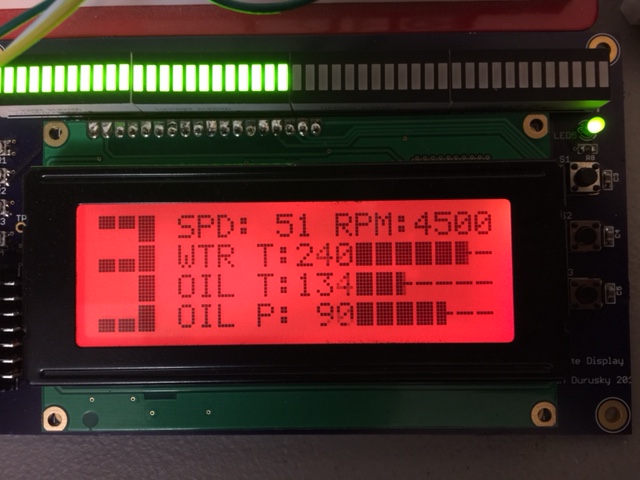 Working with an old school character display is pretty clunky, but it at least allows you to program 8 custom characters. I used five of the custom characters for the I, II, III, IIII, and IIII characters for the bar graph. I used the remaining three slots for the large number characters- basically an upper block, lower block, and full block. There are prettier 4 line characters out there, but I don’t have the memory for them with the bar graph.
Working with an old school character display is pretty clunky, but it at least allows you to program 8 custom characters. I used five of the custom characters for the I, II, III, IIII, and IIII characters for the bar graph. I used the remaining three slots for the large number characters- basically an upper block, lower block, and full block. There are prettier 4 line characters out there, but I don’t have the memory for them with the bar graph.
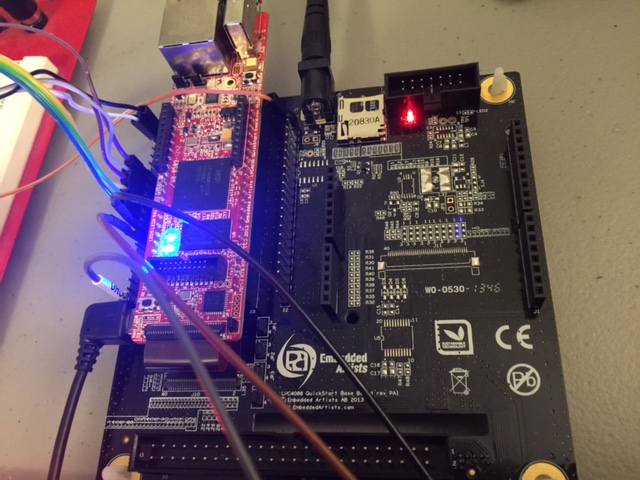
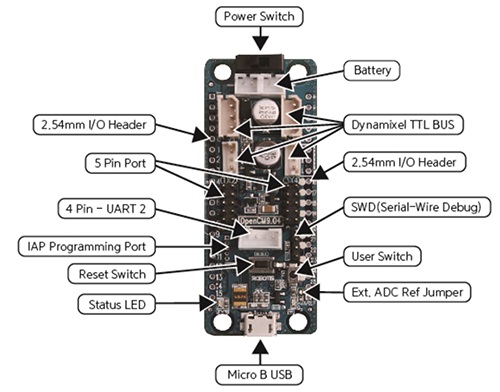
The mbed microcontroller i’m using does have a built in controller for a 7″ 800×480 full color TFT display, but that’s for another day.
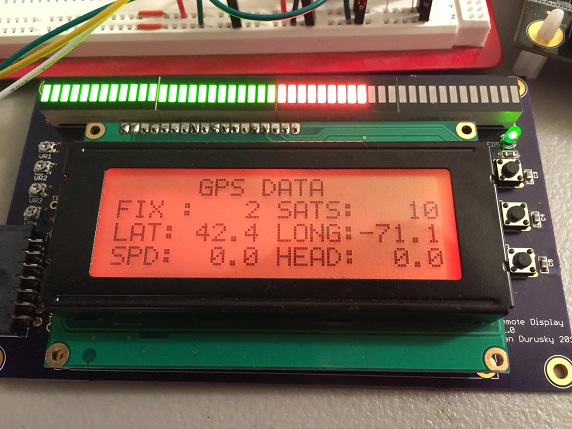
In addition to the main screen, I can scroll through different screens using the buttons on the right side of the display. As of now I have a screen showing the raw ADC data for the 8 analog inputs, a screen with all processed sensors, a screen with GPS status, a screen with some basic setup stuff. I’ll post more info on those when i get them sorted out.